BPMN definition:
Gateways are used to split and merge sequence flows in Collaboration- and Choreography diagrams.
Gateway Control Types:
Notation |
Element |
Description |
|
Exclusive gateway |
Split: Only one of the possible outgoing paths can be taken. Join: Wait until the token arrives Depiction without or with "X" is possible, but the usage should be consistent. |
|
Inclusive Gateway |
Split: More than one of the possible outgoing paths can be taken. Join: Wait, until all possible incoming tokens arrived. |
|
Parallel Gateway |
Split: All of the possible outgoing paths are taken. Join: Wait until tokens arrived from all incoming path's . |
|
Event based exclusive gateway |
Starts a process, if one of the following events occur. |
|
Event based parallel gateway |
Starts a process, if all of the following events occur. |
|
Event based gateway |
The outgoing path is determined by an event / a receive task |
|
Complex gateway |
A set of any rules. |
Concept of a token: How do diagrams behave?
The Object Management Group (OMG) has invented the token as a theoretical concept in order to define, how processes do behave when executed.
The token passes via the sequence flows through the elements.
As described for the gateway control types above, they are interacting with a token. A token passing through a Parallel Gateway that splits a sequence flow will be duplicated. One token for each sequence flow that is outgoing. At the joining Parallel Gateway the tokens of all incoming sequence flows will be collected. Only if all required tokens have arrived, they will be combined to one token again and the process can proceed.
Gateways available in the collaboration and choreography toolbox (refer to: Collaboration diagram and Choreography diagram):

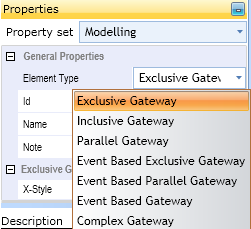
The Properties Area allows to edit the gateway properties:
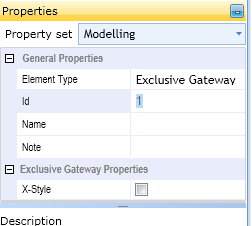
The following Properties may be edited:
Element Type |
You may change the gateway type. |
Id |
Id number, which is allocated by the system |
Name |
The name of the element. This name is displayed as text underneath the element. |
Note |
A short information about the element |
X-Style |
Determines, if the "X" in the gateway symbol is displayed |